鹿島、ハイパーデジタルツイン、羽田みらい開発、芝浦工業大学は、羽田空港に隣接する大規模複合施設「HANEDA INNOVATION CITY」において、デジタルツインをリアルタイムに活用し、道路を横断するロボットの自動制御の実証実験を行いました。
ロボットの自動制御の実証実験
鹿島、ハイパーデジタルツイン、羽田みらい開発、芝浦工業大学は、羽田空港に隣接する大規模複合施設「HANEDA INNOVATION CITY」において、デジタルツインをリアルタイムに活用し、道路を横断するロボットの自動制御の実証実験を行いました。
その有効性が確認されたのは、国内で初めてです。
この実験では、複数台のロボットを連携制御する鹿島独自のロボット統合管制システムと、リアルタイムに構築されたデジタルツインからロボットの自動制御に必要な空間情報を抽出するHDT社の独自技術を組み合せました。
これにより、ロボットに搭載されたカメラやセンサでは認識できない離れた位置や死角から接近する車や人を把握し、自動制御にて安全な位置にロボットを停止させて衝突の発生を回避できます。
さらに、これまで困難であったロボット単独での道路横断が可能となったことで、周辺の交通流や人混みを加味したロボットの自動制御の実現に近づきました。
【道路横断におけるロボットの自動制御の概要と特長】
本実験では、HDT社の技術をもとにリアルタイムに構築されたデジタルツインから抽出される空間情報を鹿島のロボット統合管制システムに通知することで、道路を横断するロボットを自動制御しました。
今回、有効性を実証した自動制御の主な特長は以下のとおりです。
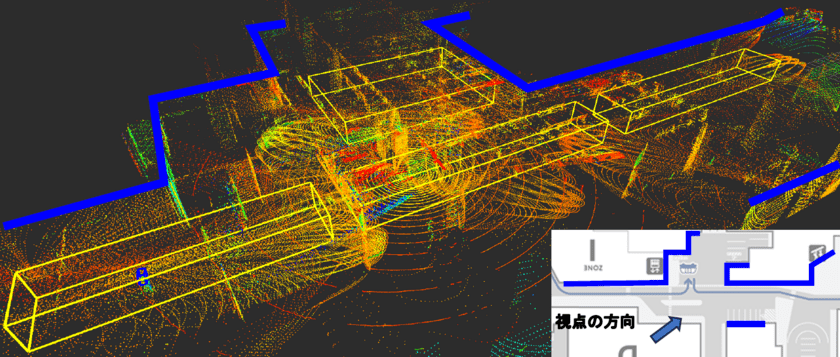
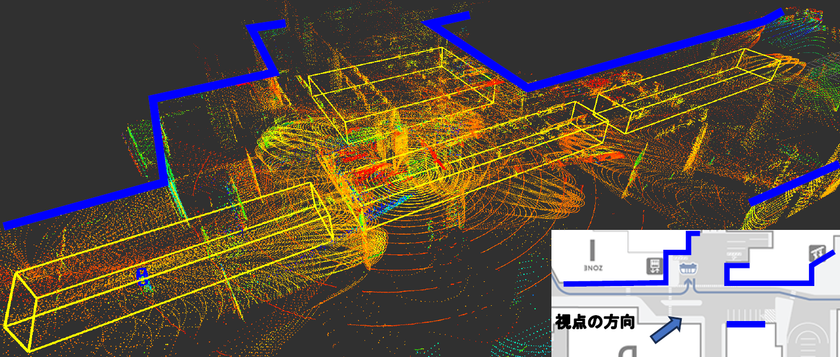
1. デジタルツインのリアルタイム活用
建物に設置した複数台のLiDARから取得したロボット周辺の車や人といった動体のデータをエッジコンピュータで解析し、デジタルツインを構築します。
その後、デジタルツインから、ロボットの自動制御に必要な空間情報をリアルタイムに抽出します。
2. 3Dマップの自動作成・更新
リアルタイムに抽出される空間情報をもとに、ロボットが初めて走行する場所の3Dマップの作成や、環境変更によるマップの更新を自動で行い、即時にロボットと連携します。
3. 空間の状況をリアルタイムに把握したロボットの自動制御の実現
リアルタイムに抽出される空間情報やそれを基に作成・更新される3Dマップを活用することで、ロボットは自身に搭載されたカメラやセンサから得られる情報だけではなく、それらの検知範囲外の空間の状況をリアルタイムに把握した走行が可能です。
これにより、ロボットは離れた位置や死角から接近する車や人を認識することができ、衝突を未然に防止する安全かつスムーズなロボットの自動制御が可能です。
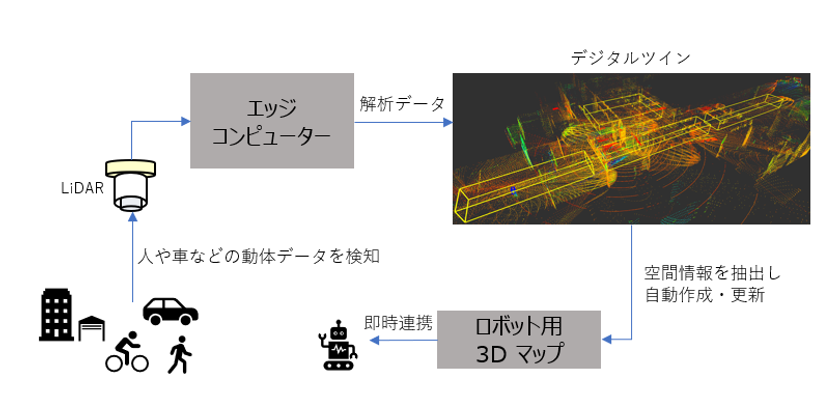
空間情報の解析からロボットの共有までのフロー図
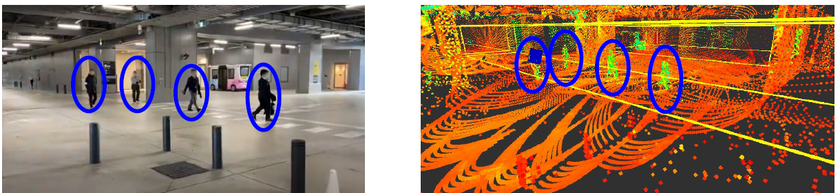
デジタルツインによる、ロボット走行エリアへの歩行者の接近検知の状況