芝浦工業大学システム理工学部生命科学科・佐藤 大樹教授らの研究チームは、柔軟な触覚センサーを活用し、手指の微細な動きを客観的に評価するシステムを開発しました。
芝浦工業大学「柔軟な触覚センサーを活用し、手指の微細な動きを客観的に評価するシステム」
芝浦工業大学システム理工学部生命科学科・佐藤 大樹教授らの研究チームは、柔軟な触覚センサーを活用し、手指の微細な動きを客観的に評価するシステムを開発。
このシステムでは、様々な「つまみ動作」を90%以上の識別率で分類することができます。
人の微細運動スキルを客観的に評価することは難しく、長年の課題となっていました。
そこで、電気インピーダンス・トモグラフィ※1を活用したトモグラフィ型触覚センサー※2を用いたアプローチを開発し、極めて高い精度で動作を識別することを示しました。
今後は、触覚センサーをさまざまな形状の物体に適用することで手指運動を促す知育玩具の開発から医学研究まで広く社会に活用されることを目指していきます。
※この研究成果は、「IEEE Access」誌に掲載されています。
ポイント
・人の細かい運動スキルを客観的に定量化し、評価することは難しく長年の課題となっていた
・柔軟な触覚センサーを用いたアプローチによって、様々な「つまみ」動作を90%以上の識別率で分類することができるシステムを開発
・知育玩具の開発から医学研究まで広く社会に活用されることを目指す
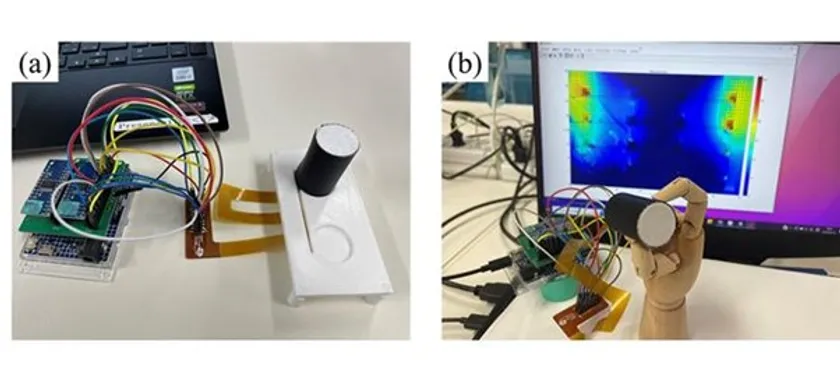
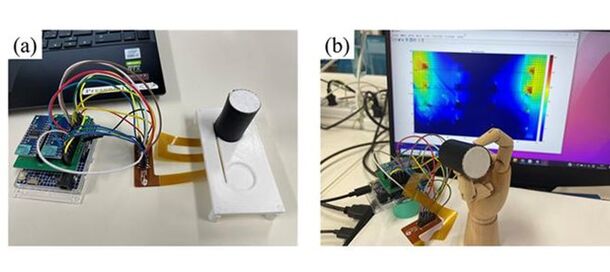
図. (a)センシングデバイスとコントローラとの接続イメージ (b)2本の指(手の模型)でセンシングデバイスを水平方向からつまむ様子
研究の背景
微細運動スキル※3は、人間の認知において重要な役割を果たしており、日常的な活動から高度な道具を使った文明の発展まで、あらゆることに影響を及ぼしています。
しかし、これらのスキルを客観的に定量化し、評価することは大きな課題となっていました。
ビデオコーディング※4のような従来の方法は効果的ですが、時間がかかり、コーディングを行う人のバイアスの影響を受けやすくなります。
さらに、モーションキャプチャーや手に装着する計測デバイスのような既存の技術にはいくつかの制限があり、特に乳幼児の指の動きを評価する際には限界がありました。
研究の概要
研究チームは、電気インピーダンス・トモグラフィに基づく柔軟な触覚センサー(トモグラフィ型触覚センサー)を応用し、指の微細な動きを客観的に評価する新しいシステムを開発しました。
本システムで使用する触覚センサーは、4つの層から構成されており、柔軟性、形状の汎用性、感度の点で従来の方法に比べて優れています。
センサーは16個の電極を備えたフレキシブルプリント回路基板と導電性材料を使用し、さまざまな指の動きから電圧データを取得することができます。
データは数値解析ソフトウェアを使って処理され、接触分布画像を再構成しました。
新しいシステムは円筒形の形状を利用しています。
この機構により、つまむ動作の正確な測定が可能になりました。
本研究では、12人の計測参加者(成人)が、指の本数と方向によって特徴付けられる6種類のつまむ動作を行い、計測した電圧信号と再構成画像を用いて6種類のつまむ動作を分類しました。
その結果、再構成画像を用いた場合の分類精度は79.1%、電圧信号を用いた場合の分類精度は91.4%でした。
今後の展望
本研究の成果は、研究と実用の両面で大きな意味を持ちます。
この触覚センサー・開発システムを応用することで乳幼児の細かな手指運動を促す知育玩具の開発が支援できます。
また、手の動きの自動解析は、発達医学研究における人手不足を解消し、将来的にはオンライン医療の実現にも貢献できる可能性があります。
今後、本研究によって、人間の複雑な運動技能がより深く理解され、社会のために活用されることを目指していきます。
語句解説
※1 電気インピーダンス・トモグラフィ
電気インピーダンス・トモグラフィ(Electrical Impedance Tomography:EIT)は非侵襲的な生体断層イメージング技術の一種です。
複数の電極を使用し、電圧の印加・接地条件を切り替え、電気的インピーダンス(電気的抵抗や導電率など)変化を計測・可視化することが出来ます。
※2 トモグラフィ型触覚センサー
2つの導電性材料が接触する際、接触圧力により電気接触抵抗が変化します。
このことに着目し、2層の導電体の電気接触抵抗分布を複数電極の接地・計測条件を切り替えて計測します。
この電気接触抵抗分布を可視化する技術をトモグラフィ型触覚センサーと呼びます。
この接触抵抗分布は、キャリブレーションにより圧力分布への変換が可能です。
この触覚センサーは柔軟性と拡張性に優れることが報告されています。
※3 微細運動スキル
J. R. Napierはヒトがモノを掴むときの運動を「握力把持(Power grip)」と「精密把持(Precision grip)」の2種類に区分しました。
握力把持は手のひらで握るような動きを指します。
精密把持は親指とそれ以外の指で対抗させてつまむような動きを指します。
本研究ではこの精密把持に注目しました。
※4 ビデオコーディング
行動解析の手法の一種。
カメラで動きを撮影し、記録映像を複数人の観察者(コーダー)が定義に従って分類します。
研究助成
本研究の一部は、JSPS科研費(23H00955)の助成を受けたものです。
論文情報
著者 : 芝浦工業大学大学院理工学研究科 朝火 龍之介
東京大学大学院新領域創成科学研究科 講師 吉元 俊輔
(現 大阪大学大学院工学研究科 准教授)
芝浦工業大学システム理工学部生命科学科 教授 佐藤 大樹
論文名: Development of Pinching Motion Classification Method using EIT-based Tactile Sensor
掲載誌: IEEE Access
DOI :
https://doi.org/10.1109/ACCESS.2024.3395271

